







- โดย อินสตราวา
- 04/13/2026
- 0 ความคิดเห็น
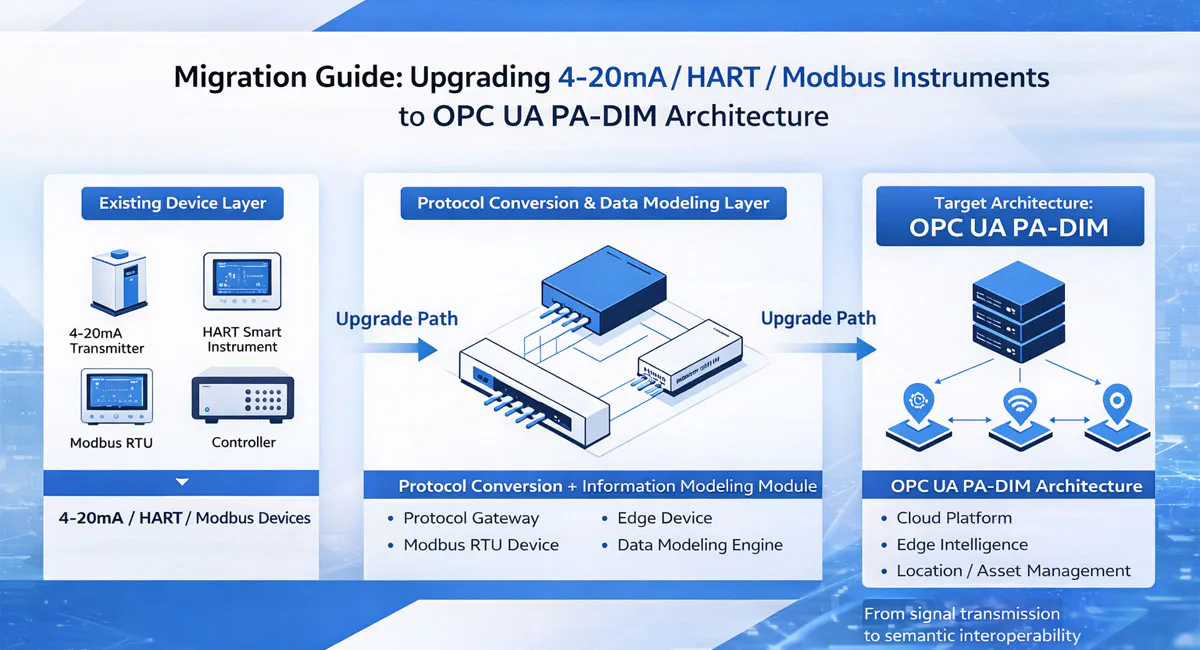
วิธีการอัปเกรดเครื่องมือ 4–20mA, HART และ Modbus เป็นสถาปัตยกรรม OPC UA PA-DIM
เครื่องมืออุตสาหกรรมแบบดั้งเดิมไม่ได้ถูกออกแบบมาเพื่อการผสานรวมกับระบบคลาวด์.
พวกเขาถูกสร้างขึ้นเพื่อ ระบบควบคุมภายในท้องถิ่น, ไม่สำหรับ:
- การปรับแต่งโดยใช้ API
- การวิเคราะห์ข้อมูลบนคลาวด์
- การตรวจสอบย้อนกลับของข้อมูล
- การเพิ่มประสิทธิภาพด้วยปัญญาประดิษฐ์
อย่างไรก็ตาม ในปี 2026 ความสามารถเหล่านี้จะไม่ใช่ทางเลือกอีกต่อไป.
ความท้าทายชัดเจน:
เครื่องมือ 4–20mA, HART และ Modbus ที่มีอยู่สามารถพัฒนาให้เข้ากันได้กับระบบ OPC UA PA-DIM โดยไม่ต้องเปลี่ยนใหม่ทั้งหมดได้อย่างไร?
ปัญหาหลัก: ข้อมูลที่ไร้ความหมาย
โปรโตคอลการสื่อสารแบบดั้งเดิมส่งข้อมูล—แต่ไม่ส่งบริบท.
- 4–20mA → มีค่าอนาล็อกเพียงค่าเดียว
- HART → ช้า, ข้อมูลที่มีโครงสร้างจำกัด
- Modbus → ค่ารีจิสเตอร์แบบดิบ
พวกเขาขาด:
- คำอธิบายตนเอง
- ความหมายมาตรฐาน
- การทำงานร่วมกันโดยกำเนิด
การเปรียบเทียบความสามารถในการสื่อสาร
| ระเบียบปฏิบัติ | ประเภทข้อมูล | ความหมายเชิงความหมาย | การควบคุมระยะไกล | ความสามารถในการขยายขนาด |
|---|---|---|---|---|
| 4–20mA | อนาล็อก | ไม่มี | ไม่ | ต่ำ |
| HART | ไฮบริด | จำกัด | บางส่วน | ต่ำ |
| Modbus RTU | ใช้การลงทะเบียน | ไม่มี | ใช่ | ระดับกลาง |
| OPC UA + PA-DIM | แบบอิงวัตถุ | เต็ม | ใช่ | สูง |
โปรโตคอลแบบดั้งเดิมให้การส่งข้อมูล—แต่ไม่มีความสามารถในการทำงานร่วมกันเชิงความหมาย.
หากไม่มีโครงสร้างเชิงความหมาย ซอฟต์แวร์จะต้อง “คาดเดา” ว่าแต่ละค่าแทนอะไร ซึ่งทำให้การรวมระบบที่สามารถขยายได้และการควบคุมผ่าน API เป็นเรื่องยากอย่างยิ่ง.
อะไรที่ทำให้ OPC UA + PA-DIM แตกต่างอย่างพื้นฐาน
เครื่องมือวัดสมัยใหม่ไม่ได้ถูกกำหนดโดยความเร็วในการสื่อสาร—แต่โดย ข้อมูลเชิงปัญญา.
OPC UA ให้บริการ:
- การสื่อสารเชิงวัตถุ
- ระบบความปลอดภัยในตัว (TLS, ใบรับรอง)
- การควบคุมตามวิธีการ (ไม่ใช่แค่การอ่านค่า)
PA-DIM ให้บริการ:
- โครงสร้างอุปกรณ์มาตรฐาน
- การตั้งชื่อพารามิเตอร์แบบรวม
- การทำงานร่วมกันระหว่างผู้ขายหลายราย
ร่วมกัน พวกเขาทำให้สามารถ:
- การเชื่อมต่อแบบเสียบแล้วใช้ได้ทันที
- การปรับแต่งระยะไกลที่ขับเคลื่อนด้วย API
- แบบจำลองข้อมูลที่สอดคล้องกันระหว่างระบบ
การลดความซับซ้อนของการบูรณาการ
ความซับซ้อนของการบูรณาการเพิ่มขึ้นอย่างทวีคูณในระบบแบบดั้งเดิม แต่ยังคงจัดการได้กับ PA-DIM.
ไม่พบข้อมูล
การมาตรฐานช่วยลดความจำเป็นในการใช้ไดร์เวอร์เฉพาะอุปกรณ์ ทำให้สถาปัตยกรรมระบบสามารถปรับขนาดได้.
ความจริง: คุณไม่สามารถทดแทนเครื่องมือที่มีอยู่ทั้งหมดได้
ในโรงงานอุตสาหกรรมส่วนใหญ่:
- อุปกรณ์รุ่นเก่าหลายพันเครื่องยังคงใช้งานอยู่
- ค่าใช้จ่ายในการทดแทนสูงมาก
- ความเสี่ยงจากการหยุดทำงานเป็นสิ่งที่ยอมรับไม่ได้
ดังนั้น วิธีการปฏิบัติจริงไม่ใช่การทดแทน—แต่คือ การเปลี่ยนแปลง.
โซลูชันหลัก: สถาปัตยกรรม Edge Gateway
สะพานเชื่อมระหว่างอุปกรณ์รุ่นเก่ากับระบบสมัยใหม่คือ เกตเวย์เอดจ์.
มันทำหน้าที่เป็น:
ตัวแปลโปรโตคอล + เครื่องมือทางความหมาย + ชั้นความปลอดภัย
สถาปัตยกรรมทำงานอย่างไร
1. การสื่อสารขาออก (ระดับภาคสนาม)
เกตเวย์เชื่อมต่อกับเครื่องมือรุ่นเก่าผ่าน:
- HART
- Modbus RTU (RS485)
- โมดูลอินพุตแบบแอนะล็อก
มันอ่านข้อมูลดิบ เช่น:
- ค่าลงทะเบียน
- สัญญาณอนาล็อก
- พารามิเตอร์ของอุปกรณ์
2. การทำแผนที่เชิงความหมาย (ชั้นแกนหลัก)
นี่คือขั้นตอนที่สำคัญที่สุด.
เกตเวย์แปลงข้อมูลดิบให้เป็นโมเดลที่มีโครงสร้าง:
- ลงทะเบียน 40001 → ค่า pH
- บิตสถานะ → การวินิจฉัยอุปกรณ์
- สัญญาณดิบ → หน่วยทางวิศวกรรม
จากนั้นจึงแปลงเป็น วัตถุ PA-DIM.
กระบวนการแปลงข้อมูล
| เวที | ประเภทข้อมูล |
|---|---|
| เอาต์พุตของเครื่องมือ | สัญญาณดิบ / รีจิสเตอร์ |
| เกตเวย์อินพุต | ค่าที่แยกวิเคราะห์แล้ว |
| การแมปเชิงความหมาย | ตัวแปรที่มีโครงสร้าง |
| ผลลัพธ์จากเซิร์ฟเวอร์ OPC UA | วัตถุ PA-DIM |
เกตเวย์แปลงข้อมูลอุตสาหกรรมดิบให้เป็นข้อมูลมาตรฐานที่เครื่องจักรสามารถอ่านได้.
ขั้นตอนนี้ช่วยให้ระบบคลาวด์สามารถโต้ตอบกับอุปกรณ์รุ่นเก่าได้เสมือนเป็นเครื่องมือ OPC UA สมัยใหม่.
3. การสื่อสารขาเข้า (ระดับคลาวด์)
เกตเวย์เปิดเผย:
- เซิร์ฟเวอร์ OPC UA
- สตรีมข้อมูล MQTT
- REST APIs
แพลตฟอร์มคลาวด์ของคุณ (“สมองคลาวด์”) เชื่อมต่อในฐานะไคลเอนต์ OPC UA.
จากมุมมองของมัน:
- ไม่มีรีจิสเตอร์ Modbus
- ไม่มีคำสั่ง HART
- เฉพาะวัตถุ PA-DIM ที่มีการมาตรฐาน
การเปิดใช้งานการปรับแต่งระยะไกลผ่าน API
เมื่อการสร้างแผนที่เชิงความหมายเสร็จสมบูรณ์แล้ว:
การควบคุมผ่าน API เป็นไปได้.
ตัวอย่าง:
กระบวนการ:
- คำขอ API ถูกส่งจากคลาวด์
- เกตเวย์แปลคำขอ
- แผนที่ไปยังคำสั่ง Modbus/HART
- ส่งไปยังอุปกรณ์
- ยืนยันการดำเนินการ
นี่สร้างขึ้น วงจรควบคุมแบบปิด ระหว่างซอฟต์แวร์และฮาร์ดแวร์.
การเปิดใช้งาน “ลายนิ้วมือดิจิทัล” สำหรับข้อมูลอุตสาหกรรม
เพื่อให้เป็นไปตามข้อกำหนดและสามารถตรวจสอบย้อนกลับได้ ข้อมูลต้อง:
- แท้จริง
- มีการบันทึกเวลา
- ป้องกันการปลอมแปลง
โครงสร้างพื้นฐานที่จำเป็น
✔ ตัวตนของอุปกรณ์
- รหัสประจำอุปกรณ์ที่ไม่ซ้ำกัน
- ลายเซ็นดิจิทัล
✔ การซิงโครไนซ์เวลา
- การปรับเวลาให้ตรงกันทั่วทั้งเครือข่าย
✔ การส่งข้อมูลที่ปลอดภัย
- การสื่อสารแบบเข้ารหัส
✔ การจัดเก็บข้อมูลที่ไม่สามารถเปลี่ยนแปลงได้
- บล็อกเชนหรือฐานข้อมูลที่ปลอดภัย
การเปรียบเทียบระดับความน่าเชื่อถือของข้อมูล
ความไว้วางใจในข้อมูลเพิ่มขึ้นอย่างมีนัยสำคัญเมื่อมีการนำระบบเข้ารหัสลับและระบบกระจายศูนย์มาใช้.
ไม่พบข้อมูล
ลายนิ้วมือดิจิทัลช่วยให้มั่นใจได้ว่าทุกการวัดสามารถตรวจสอบได้และพร้อมสำหรับการตรวจสอบ—ซึ่งมีความสำคัญอย่างยิ่งต่อการปฏิบัติตามข้อกำหนดด้านสิ่งแวดล้อมและกฎระเบียบ.
ข้อสรุปสุดท้าย: การเปลี่ยนแปลงโดยไม่หยุดชะงัก
คุณไม่จำเป็นต้องเปลี่ยนเครื่องมือที่มีอยู่เพื่อเข้าสู่ยุคถัดไป.
แทนที่:
- เพิ่มปัญญาที่ขอบเขต
- มาตรฐานข้อมูลผ่าน PA-DIM
- เปิดใช้งานการโต้ตอบผ่าน API
- ปกป้องข้อมูลด้วยตัวตนดิจิทัล
บทสรุป: จากสัญญาณดั้งเดิมสู่ระบบอัจฉริยะ
สัญญาณแบบดั้งเดิม เช่น 4–20mA, HART และ Modbus ไม่ได้ล้าสมัย—แต่ยังไม่สมบูรณ์.
ด้วยสถาปัตยกรรมที่เหมาะสม:
- เครื่องดนตรีรุ่นเก่ากลายเป็นโหนดอัจฉริยะ
- ข้อมูลดิบกลายเป็นข้อมูลที่มีโครงสร้าง
- อุปกรณ์ท้องถิ่นกลายเป็นส่วนหนึ่งของระบบคลาวด์
อินสตราวา สนับสนุนการเปลี่ยนแปลงนี้โดยการเปิดใช้งาน สถาปัตยกรรมเครื่องมือวัดที่สามารถทำงานร่วมกันได้, ปลอดภัย, และสามารถปรับขนาดได้—เชื่อมโยงช่องว่างระหว่างโครงสร้างพื้นฐานแบบดั้งเดิมกับปัญญาอุตสาหกรรมสมัยใหม่.